-
1 во время работы (механизма)
Engineering: while in operationУниверсальный русско-английский словарь > во время работы (механизма)
-
2 время работы
n1) gener. Arbeitszeit, Betriebsdauer, Brenndauer (реактивного двигателя ракеты), Öffnungszeit (музеев, магазинов и т. п.)2) comput. Leistungszeit3) Av. Beobachtunsszeit (аэродинамической трубы), Brennlänge (двигателя)4) eng. Laufzeit5) law. Bürostunden, Bürozeit6) auto. Laufwerkzeit (транспортного средства)7) artil. Laufzeit (механизма)8) oil. Laufzeit (двигателя)9) busin. Öffnungszeiten10) manag. Öffnungszeit (офиса, магазина)11) missil. Brennzeit (двигателя)12) f.trade. Betriebszeit13) aerodyn. Beobachtungszeit (аэродинамической трубы), Brenndauer (ракетного двигателя), Versuchszeit (аэродинамической трубы), Einsatzzeit -
3 во время работы
1) Engineering: (механизма) while in operation2) Construction: in service3) Sakhalin energy glossary: on service4) Cellular communications: while in service -
4 неплавность работы
работа с перебоями — erratic operation; rough running
Русско-английский новый политехнический словарь > неплавность работы
-
5 на ходу
in motion, on the move, without stopping ( во время движения) ; in working/running order ( в рабочем состоянии); ( во время работы механизма) while running -
6 ход
муж.дать задний ход — to put it into reverse, to back down/off/out
на полный ход — at full capacity (о механизме, фабрике); at its height/peak, going strong (о бизнесе, торговле)
ход развития — process; time history
в ходе чего-л. — during, in the course of
гусеничный ход — caterpillar, crawler тех.
есть на ходу — to snatch a meal/bite
задний ход — backing, reverse; backward; reverse motion
замедлять ход — to slow down, to reduce speed
на полном ходу — full-pelt, in full operation
на ходу — in motion, on the move, without stopping ( во время движения) ; in working/running order ( в рабочем состоянии); ( во время работы механизма) while running
полный ход, полный вперед — full speed (ahead)
прибавлять ходу, поддать ходу — to pick up speed; to step on the gas ( о водителе)
свободный ход — free wheeling; coasting (об автомобиле)
своим ходом — under one's own steam/power, on one's own ( двигаться); at one's own pace, (to take) its course ( развиваться)
ход рассуждений — chain/line of argument/reasoning
ход событий — course/march of events; trend of developments
- ход со дворазнать все ходы и выходы — to know all the ins and outs, to be perfectly at home разг.
- ход сообщения
- черный ход3) мн. ч. ходы (в игре) move шахм.; lead, turn карт.ваш ход — it is your move (в шахматах); it is your lead (в картах)
чей ход? — whose move is it? (в шахматах); who is it to lead? (в картах)
•на гусеничном ходу — caterpillar-mounted, caterpillar-tracked; mounted on caterpillar tracks
••дать ход — (делу, заявлению и т.п.)
идти в ход, идти в дело — to be put to use, to be used
пустить в ход — (что-л.)to star, to set going, to give a start, to set in train; to get under way, to get started (о деле, предприятии); to start (up) an engine, to get running/going (о машине, механизме и т.п.); to start (up) a factory, to put a factory into operation (о фабрике и т.п.); to put smth. to use (свое обаяние и т.п.); to put forward an argument ( аргумент)
дела идут полным ходом — affairs/things are in full swing
пускать в ход все средства — to leave no stone unturned; to move heaven and earth
- ловкий ходэтот товар в большом ходу — this article is in great demand, these goods are in great request
- не давать хода
- с ходу -
7 допускающий регулировку на ходу
Automobile industry: adjustable while running (во время работы механизма)Универсальный русско-английский словарь > допускающий регулировку на ходу
-
8 привод контактного аппарата
привод контактного аппарата
Устройство, предназначенное для создания или передачи силы, воздействующей на подвижные части контактного аппарата для выполнения функции этого аппарата.
[ ГОСТ 17703-72]
привод
Устройство, предназначенное для создания и передачи силы, воздействующей на подвижные части выключателя для выполнения его функций, а также для удержания выключателя в конечном положении.
[ ГОСТ Р 52565-2006]Приводы являются аппаратами для включения и удержания во включенном положении, а также отключения коммутационных аппаратов (масляного выключателя, выключателя нагрузки или разъединителя).
С помощью приводов осуществляется ручное, автоматическое и дистанционное управление коммутационными аппаратами.
По роду используемой энергии приводы разделяются- на ручные,
- пружинные,
- электромагнитные,
- электродвигательные,
- пневматические.
По роду действия приводы бывают
- прямого действия
- косвенного действия.
В приводах прямого действия движение включающего устройства передается непосредственно на приводной механизм выключателя в момент подачи импульса от источника энергии. Такие приводы потребляют большое количество энергии.
В приводах косвенного действия энергия, необходимая для включения, предварительно запасается в специальных устройствах: маховиках, пружинах, грузах и т. д.
[Цигельман И. Е. Электроснабжение гражданских зданий и коммунальных предприятий: Учеб. для электромеханич. спец. техникумов. - М.: Высш. шк. 1988.]
Приводы служат для включения, удержания во включенном положении и отключения разъединителей и выключателей.
Основные требования, предъявляемые к приводу выключателя, состоят в том, что каждый привод должен развивать мощность, достаточную для включения выключателя при самых тяжелых условиях работы (включение на короткое замыкание, пониженное напряжение питания), и быть быстродействующим, т. е. производить включение за весьма малый промежуток времени. При медленном включении на существующее в сети КЗ возможно приваривание контактов.
При включении выключателя совершается большая работа по преодолению сопротивления отключающих пружин, сопротивления упругих частей контактов, трения в механизме, сопротивления масла движению подвижных частей выключателя, электродинамических сил, препятствующих включению, и др.
При отключении привод выключателя совершает небольшую работу, необходимую только для освобождения запорного механизма, так как отключение выключателя происходит под действием его отключающих пружин.
В зависимости от рода энергии, используемой для включения, приводы разделяются на ручные, грузовые, пружинно-грузовые, пружинные, электромагнитные, пневматические и гидравлические.
К наиболее простым относятся ручные приводы, не требующие специального источника электроэнергии для подготовки операции включения. Однако эти приводы имеют ряд существенных недостатков: не позволяют осуществлять дистанционное включение, не могут быть применены в схемах АВР (автоматического включения резерва) и АПВ (автоматического повторного включения), требуют приложения значительной мускульной силы оператора и не позволяют получить высокие скорости подвижных контактов выключателя, необходимые при больших токах КЗ.
Более совершенными, имеющими большие возможности, но в то же время и более сложными являются грузовые и пружинные приводы, которые обеспечивают значительно более высокие скорости включения выключателя по сравнению с ручными. Это в свою очередь позволяет увеличить включающую способность выключателя. Грузовые и пружинные приводы включают выключатель за счет заранее накопленной энергии поднятого груза или заведенной пружины. Накопление достаточного количества энергии может производиться в течение сравнительно большого промежутка времени (десятки секунд), поэтому мощность электродвигателей таких приводов может быть небольшой (0,1—0.3 кВт).
Электромагнитные приводы включают выключатель за счет энергии включающего электромагнита. Электромагнитные приводы предназначены для работы на постоянном токе. Питание их осуществляют от аккумуляторных батарей или выпрямителей. По способу питания энергией приводы подразделяют на две группы: прямого и косвенного действия.
У приводов прямого действия энергия, расходуемая на включение, сообщается приводу во время процесса включения. К приводам прямого действия относятся ручные с использованием мускульной силы человека и электромагнитные или соленоидные приводы. Работа приводов косвенного действия основана на предварительно запасаемой энергии. К таким приводам относятся грузовые, пружинно-грузовые и пружинные приводы, а также пневматические и гидравлические. Последние два типа приводов не нашли широкого применения для выключателей 6—10 кВ и поэтому нами не рассматриваются.
Приводы прямого действия по конструкции более просты по сравнению с приводами косвенного действия, и в этом их преимущество. Однако поскольку приводы прямого действия питаются от источника энергии непосредственно во время процесса включения выключателя, то потребляемая ими мощность во много раз больше, чем у приводов косвенного действия. Это — существенный недостаток приводов прямого действия.
Ко всем приводам выключателей предъявляют требование наличия механизма свободного расцепления, т. е. возможности освобождения выключателя от связи с удерживающим и заводящим механизмами привода при срабатывании отключающего устройства и отключения выключателя под действием своих отключающих пружин. Современные приводы имеют свободное расцепление почти на всем ходу контактов, т. е. практически в любой момент от начала включения может произойти отключение. Это особенно важно при включении на КЗ. В этом случае отключение произойдет в первый же момент возникновения дуги, что предотвратит опасность сильного оплавления и сваривания контактов.[http://forca.ru/stati/podstancii/privody-razediniteley-i-maslyanyh-vyklyuchateley-6-10-kv-i-ih-remont.html]
Тематики
- выключатель, переключатель
- высоковольтный аппарат, оборудование...
Классификация
>>>Синонимы
EN
Смотри также
Русско-английский словарь нормативно-технической терминологии > привод контактного аппарата
9 управление аварийными сигналами
управление аварийными сигналами
-
[Интент]
Переход от аналоговых систем к цифровым привел к широкому, иногда бесконтрольному использованию аварийных сигналов. Текущая программа снижения количества нежелательных аварийных сигналов, контроля, определения приоритетности и адекватного реагирования на такие сигналы будет способствовать надежной и эффективной работе предприятия.Если технология хороша, то, казалось бы, чем шире она применяется, тем лучше. Разве не так? Как раз нет. Больше не всегда означает лучше. Наступление эпохи микропроцессоров и широкое распространение современных распределенных систем управления (DCS) упростило подачу сигналов тревоги при любом сбое технологического процесса, поскольку затраты на это невелики или равны нулю. В результате в настоящее время на большинстве предприятий имеются системы, подающие ежедневно огромное количество аварийных сигналов и уведомлений, что мешает работе, а иногда приводит к катастрофическим ситуациям.
„Всем известно, насколько важной является система управления аварийными сигналами. Но, несмотря на это, на производстве такие системы управления внедряются достаточно редко", - отмечает Тодд Стауффер, руководитель отдела маркетинга PCS7 в компании Siemens Energy & Automation. Однако события последних лет, среди которых взрыв на нефтеперегонном заводе BP в Техасе в марте 2005 г., в результате которого погибло 15 и получило травмы 170 человек, могут изменить отношение к данной проблеме. В отчете об этом событии говорится, что аварийные сигналы не всегда были технически обоснованы.
Широкое распространение компьютеризированного оборудования и распределенных систем управления сделало более простым и быстрым формирование аварийных сигналов. Согласно новым принципам аварийные сигналы следует формировать только тогда, когда необходимы ответные действия оператора. (С разрешения Siemens Energy & Automation)
Этот и другие подобные инциденты побудили специалистов многих предприятий пересмотреть программы управления аварийными сигналами. Специалисты пытаются найти причины непомерного роста числа аварийных сигналов, изучить и применить передовой опыт и содействовать разработке стандартов. Все это подталкивает многие компании к оценке и внедрению эталонных стандартов, таких, например, как Publication 191 Ассоциации пользователей средств разработки и материалов (EEMUA) „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке", которую многие называют фактическим стандартом систем управления аварийными сигналами. Тим Дональдсон, директор по маркетингу компании Iconics, отмечает: „Распределение и частота/колебания аварийных сигналов, взаимная корреляция, время реакции и изменения в действиях оператора в течение определенного интервала времени являются основными показателями отчетов, которые входят в стандарт EEMUA и обеспечивают полезную информацию для улучшения работы предприятия”. Помимо этого как конечные пользователи, так и поставщики поддерживают развитие таких стандартов, как SP-18.02 ISA «Управление системами аварийной сигнализации для обрабатывающих отраслей промышленности». (см. сопроводительный раздел „Стандарты, эталоны, передовой опыт" для получения более подробных сведений).
Предполагается, что одной из причин взрыва на нефтеперегонном заводе BP в Техасе в 2005 г., в результате которого погибло 15 и получило ранения 170 человек, а также был нанесен значительный ущерб имуществу, стала неэффективная система аварийных сигналов.(Источник: Комиссия по химической безопасности и расследованию аварий США)
На большинстве предприятий системы аварийной сигнализации очень часто имеют слишком большое количество аварийных сигналов. Это в высшей степени нецелесообразно. Показатели EEMUA являются эталонными. Они содержатся в Publication 191 (1999), „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке".
Начало работы
Наиболее важным представляется вопрос: почему так велико количество аварийных сигналов? Стауффер объясняет это следующим образом: „В эпоху аналоговых систем аварийные сигналы реализовывались аппаратно. Они должны были соответствующим образом разрабатываться и устанавливаться. Каждый аварийный сигнал имел реальную стоимость - примерно 1000 долл. США. Поэтому они выполнялись тщательно. С развитием современных DCS аварийные сигналы практически ничего не стоят, в связи с чем на предприятиях стремятся устанавливать все возможные сигналы".
Характеристики «хорошего» аварийного сообщения
В число базовых требований к аварийному сообщению, включенных в аттестационный документ EEMUA, входит ясное, непротиворечивое представление информации. На каждом экране дисплея:
• Должно быть четко определено возникшее состояние;
• Следует использовать терминологию, понятную для оператора;
• Должна применяться непротиворечивая система сокращений, основанная на стандартном словаре сокращений для данной отрасли производства;
• Следует использовать согласованную структуру сообщения;
• Система не должна строиться только на основе теговых обозначений и номеров;
• Следует проверить удобство работы на реальном производстве.
Информация из Publication 191 (1999) EEMUA „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке".
Качественная система управления аварийными сигналами должна опираться на руководящий документ. В стандарте ISA SP-18.02 «Управление системами аварийной сигнализации для обрабатывающих отраслей промышленности», предложен целостный подход, основанный на модели жизненного цикла, которая включает в себя определяющие принципы, обучение, контроль и аудит.
Именно поэтому операторы сегодня часто сталкиваются с проблемой резкого роста аварийных сигналов. В соответствии с рекомендациями Publication 191 EEMUA средняя частота аварийных сигналов не должна превышать одного сигнала за 10 минут, или не более 144 сигналов в день. В большинстве отраслей промышленности показатели значительно выше и находятся в диапазоне 5-9 сигналов за 10 минут (см. таблицу Эталонные показатели для аварийных сигналов). Дэвид Гэртнер, руководитель служб управления аварийными сигналами в компании Invensys Process Systems, вспоминает, что при запуске производственной установки пяти операторам за полгода поступило 5 миллионов сигналов тревоги. „От одного из устройств было получено 550 000 аварийных сигналов. Устройство работает на протяжении многих месяцев, и до сих пор никто не решился отключить его”.
Практика прошлых лет заключалась в том, чтобы использовать любые аварийные сигналы независимо от того - нужны они или нет. Однако в последнее время при конфигурировании систем аварийных сигналов исходят из необходимости ответных действий со стороны оператора. Этот принцип, который отражает фундаментальные изменения в разработке систем и взаимодействии операторов, стал основой проекта стандарта SP18 ISA. В этом документе дается следующее определение аварийного сигнала: „звуковой и/или визуальный способ привлечения внимания, указывающий оператору на неисправность оборудования, отклонения в технологическом процессе или аномальные условия эксплуатации, которые требуют реагирования”. При такой практике сигнал конфигурируется только в том случае, когда на него необходим ответ оператора.
Адекватная реакция
Особенно важно учитывать следующую рекомендацию: „Не следует ничего предпринимать в отношении событий, для которых нет измерительного инструмента (обычно программного)”.Высказывания Ника Сэнд-за, сопредседателя комитета по разработке стандартов для систем управления аварийными сигналами SP-18.00.02 Общества ISA и менеджера технологий управления процессами химического производства DuPont, подчеркивают необходимость контроля: „Система контроля должна сообщать - в каком состоянии находятся аварийные сигналы. По каким аварийным сигналам проводится техническое обслуживание? Сколько сигналов имеет самый высокий приоритет? Какие из них относятся к системе безопасности? Она также должна сообщать об эффективности работы системы. Соответствует ли ее работа вашим целям и основополагающим принципам?"
Кейт Джоунз, старший менеджер по системам визуализации в Wonderware, добавляет: „Во многих отраслях промышленности, например в фармацевтике и в пищевой промышленности, уже сегодня требуется ведение баз данных по материалам и ингредиентам. Эта информация может также оказаться полезной при анализе аварийных сигналов. Мы можем установить комплект оборудования, работающего в реальном времени. Оно помогает определить место, где возникла проблема, с которой связан аварийный сигнал. Например, можно создать простые гистограммы частот аварийных сигналов. Можно сформировать отчеты об аварийных сигналах в соответствии с разными уровнями системы контроля, которая предоставляет сведения как для менеджеров, так и для исполнителей”.
Представитель компании Invensys Гэртнер утверждает, что двумя основными элементами каждой программы управления аварийными сигналами должны быть: „хороший аналитический инструмент, с помощью которого можно определить устройства, подающие наибольшее количество аварийных сигналов, и эффективный технологический процесс, позволяющий объединить усилия персонала и технические средства для устранения неисправностей. Инструментарий помогает выявить источник проблемы. С его помощью можно определить наиболее частые сигналы, а также ложные и отвлекающие сигналы. Таким образом, мы можем выяснить, где и когда возникают аварийные сигналы, можем провести анализ основных причин и выяснить, почему происходит резкое увеличение сигналов, а также установить для них новые приоритеты. На многих предприятиях высокий приоритет установлен для всех аварийных сигналов. Это неприемлемое решение. Наиболее разумным способом распределения приоритетности является следующий: 5 % аварийных сигналов имеют приоритет № 1, 15% приоритет № 2, и 80% приоритет № 3. В этом случае оператор может отреагировать на те сигналы, которые действительно важны”.
И, тем не менее, Марк МакТэвиш, руководитель группы решений в области управления аварийными сигналами и международных курсов обучения в компании Matrikon, отмечает: „Необходимо помнить, что программное обеспечение - это всего лишь инструмент, оно само по себе не является решением. Аварийные сигналы должны представлять собой исключительные случаи, которые указывают на события, выходящие за приемлемые рамки. Удачные программы управления аварийными сигналами позволяют добиться внедрения на производстве именно такого подхода. Они помогают инженерам изо дня в день управлять своими установками, обеспечивая надежный контроль качества и повышение производительности за счет снижения незапланированных простоев”.
Система, нацеленная на оператора
Тем не менее, даже наличия хорошей системы сигнализации и механизма контроля и анализа ее функционирования еще недостаточно. Необходимо следовать основополагающим принципам, руководящему документу, который должен стать фундаментом для всей системы аварийной сигнализации в целом, подчеркивает Сэндз, сопредседатель ISA SP18. При разработке стандарта „основное внимание мы уделяем не только рационализации аварийных сигналов, - говорит он, - но и жизненному циклу систем управления аварийными сигналами в целом, включая обучение, внесение изменений, совершенствование и периодический контроль на производственном участке. Мы стремимся использовать целостный подход к системе управления аварийными сигналами, построенной в соответствии с ISA 84.00.01, Функциональная безопасность: Системы безопасности с измерительной аппаратурой для сектора обрабатывающей промышленности». (см. диаграмму Модель жизненного цикла системы управления аварийными сигналами)”.
«В данном подходе учитывается участие оператора. Многие недооценивают роль оператора,- отмечает МакТэвиш из Matrikon. - Система управления аварийными сигналами строится вокруг оператора. Инженерам трудно понять проблемы оператора, если они не побывают на его месте и не получат опыт управления аварийными сигналами. Они считают, что знают потребности оператора, но зачастую оказывается, что это не так”.
Удобное отображение информации с помощью человеко-машинного интерфейса является наиболее существенным аспектом системы управления аварийными сигналами. Джонс из Wonderware говорит: „Аварийные сигналы перед поступлением к оператору должны быть отфильтрованы так, чтобы до оператора дошли нужные сообщения. Программное обеспечение предоставляет инструментарий для удобной конфигурации этих параметров, но также важны согласованность и подтверждение ответных действий”.
Аварийный сигнал должен сообщать о том, что необходимо сделать. Например, как отмечает Стауффер из Siemens: „Когда специалист по автоматизации настраивает конфигурацию системы, он может задать обозначение для физического устройства в соответствии с системой идентификационных или контурных тегов ISA. При этом обозначение аварийного сигнала может выглядеть как LIC-120. Но оператору информацию представляют в другом виде. Для него это 'регулятор уровня для резервуара XYZ'. Если в сообщении оператору указываются неверные сведения, то могут возникнуть проблемы. Оператор, а не специалист по автоматизации является адресатом. Он - единственный, кто реагирует на сигналы. Сообщение должно быть сразу же абсолютно понятным для него!"
Эдди Хабиби, основатель и главный исполнительный директор PAS, отмечает: „Эффективность деятельности оператора, которая существенно влияет на надежность и рентабельность предприятия, выходит за рамки совершенствования системы управления аварийными сигналами. Инвестиции в операторов являются такими же важными, как инвестиции в современные системы управления технологическим процессом. Нельзя добиться эффективности работы операторов без учета человеческого фактора. Компетентный оператор хорошо знает технологический процесс, имеет прекрасные навыки общения и обращения с людьми и всегда находится в состоянии готовности в отношении всех событий системы аварийных сигналов”. „До возникновения DCS, -продолжает он, - перед оператором находилась схема технологического процесса, на которой были указаны все трубопроводы и измерительное оборудование. С переходом на управление с помощью ЭВМ сотни схем трубопроводов и контрольно-измерительных приборов были занесены в компьютерные системы. При этом не подумали об интерфейсе оператора. Когда произошел переход от аналоговых систем и физических схем панели управления к цифровым системам с экранными интерфейсами, оператор утратил целостную картину происходящего”.
«Оператору также требуется иметь необходимое образование в области технологических процессов, - подчеркивает Хабиби. - Мы часто недооцениваем роль обучения. Каковы принципы работы насоса или компрессора? Летчик гражданской авиации проходит бесчисленные часы подготовки. Он должен быть достаточно подготовленным перед тем, как ему разрешат взять на себя ответственность за многие жизни. В руках оператора химического производства возможно лежит не меньшее, если не большее количество жизней, но его подготовка обычно ограничивается двухмесячными курсами, а потом он учится на рабочем месте. Необходимо больше внимания уделять повышению квалификации операторов производства”.
Рентабельность
Эффективная система управления аварийными сигналами стоит времени и денег. Однако и неэффективная система также стоит денег и времени, но приводит к снижению производительности и повышению риска для человеческой жизни. Хотя создание новой программы управления аварийными сигналами или пересмотр и реконструкция старой может обескуражить кого угодно, существует масса информации по способам реализации и достижения целей системы управления аварийными сигналами.
Наиболее важным является именно определение цели и способов ее достижения. МакТэвиш говорит, что система должна выдавать своевременные аварийные сигналы, которые не дублируют друг друга, адекватно отражают ситуацию, помогают оператору диагностировать проблему и определять эффективное направление действий. „Целью является поддержание производства в безопасном, надежном рабочем состоянии, которое позволяет выпускать качественный продукт. В конечном итоге целью является финансовая прибыль. Если на предприятии не удается достичь этих целей, то его существование находится под вопросом.
Управление аварийными сигналами - это процесс, а не схема, - подводит итог Гэртнер из Invensys. - Это то же самое, что и производственная безопасность. Это - постоянный процесс, он никогда не заканчивается. Мы уже осознали высокую стоимость низкой эффективности и руководители предприятий больше не хотят за нее расплачиваться”.
Автор: Джини Катцель, Control Engineering
[ http://controlengrussia.com/artykul/article/hmi-upravlenie-avariinymi-signalami/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление аварийными сигналами
10 технология коммутации
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Русско-английский словарь нормативно-технической терминологии > технология коммутации
11 синхронизация времени
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Русско-английский словарь нормативно-технической терминологии > синхронизация времени
12 продолжительность
duration
- (наименование графы продолжительности режима работы двигателя, агрегата) — time limit. the takeoff power time limit is (5) minutes.
- испытание — duration of test, test duration
- полета — time in flight
- полета, максимальная — endurance
максимальное время нахождения самолета в воздухе от взлета до посадки (без дозаправки топливом), — endurance expresses the length of time the aircraft can continue.flying without refueling.
- полета на крейсерской ско расти, максимальная — cruising endurance
- полета, практическая — service endurance
продолжительность полета от взлета до посадки в условиях, принятых для определения практической дальности.
- пользования кислородом — oxygen duration
- прогрева (двигателя) — warm-up period
- работы двигателя в полете — engine flying time
- работы двигателя на земле (графа формуляра) — engine ground time
- разворота — duration of turn
- разряда — discharge time
- торможения — braking period
- фазы впуска (пд) — intake period
- хода часового механизма — clock mechanism rating
продолжительность хода часов при полном заводе составляет 48 часов. — the clock mechanism rating when wound tight, is 48 hours.Русско-английский сборник авиационно-технических терминов > продолжительность
13 рабочее место
рабочее место
Элементарная единица структуры предприятия, где размещены исполнители работы, обслуживаемое технологическое оборудование, часть конвейера, на ограниченное время оснастка и предметы труда.
Примечание:
Определение рабочего места приведено применительно к машиностроительному производству. Определение рабочего места, применяемое в других отраслях народного хозяйства, установлено ГОСТ 19605
[ ГОСТ 14.004-83]
рабочее место
Зона, оснащенная необходимыми техническими средствами, в которой совершается трудовая деятельность исполнителя или группы исполнителей, совместно выполняющих одну работу или операцию
[ ГОСТ 19605-74]
рабочее место
Совокупность рабочего оборудования в рабочей области, окруженного рабочими условиями.
[ГОСТ Р ЕН 614-1-2003]
место рабочее
1. Определённый участок производственной площади, закреплённый за рабочим, служащим или бригадой, оборудованный соответственно характеру выполняемых работ
2. Расчётная единица для определения размеров торгового предприятия
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ОСНОВНЫХ ВОПРОСОВ ПЕРВИЧНОГО ИНСТРУКТАЖА НА РАБОЧЕМ МЕСТЕ
1. Общие сведения о технологическом процессе и оборудовании на данном рабочем месте, производственном участке, в цехе. Основные опасные и вредные производственные факторы, возникающие при данном технологическом процессе.
2. Безопасная организация и содержание рабочего места.
3. Опасные зоны машины, механизма, прибора. Средства безопасности оборудования (предохранительные, тормозные устройства и ограждения, системы блокировки и сигнализации, знаки безопасности). Требования по предупреждению электротравматизма.
4. Порядок подготовки к работе (проверка исправности оборудования, пусковых приборов, инструмента и приспособлений, блокировок, заземления и других средств защиты).
5. Безопасные приемы и методы работы; действия при возникновении опасной ситуации.
6. Средства индивидуальной защиты на данном рабочем месте и правила пользования ими.
7. Схема безопасного передвижения работающих на территории цеха, участка.
8. Внутрицеховые транспортные и грузоподъемные средства и механизмы. Требования безопасности при погрузочно-разгрузочных работах и транспортировке грузов.
9. Характерные причины аварий, взрывов, пожаров, случаев производственных травм.
10. Меры предупреждения аварий, взрывов, пожаров. Обязанность и действия при аварии, взрыве, пожаре. Способы применения имеющихся на участке средств пожаротушения, противоаварийной защиты и сигнализации, места их расположения.
[ ГОСТ 12.0.004-90]Тематики
- безопасность машин и труда в целом
- организация труда, производства
- технологическая подготовка производства
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > рабочее место
14 выключатель нагрузки
- loadbreak
- load-interrupt switch
- load-breaking isolator
- load-break switch
- load-break cutout
- load-break
- load switch
- load interrupter switch
- load interrupter
- load disconnecting switch
- load break switch
- LBS
выключатель нагрузки
Коммутационный аппарат для отключения и включения цепей под нагрузкой в электрических установках напряжением 6-10 кВ (при токах соответственно Iном=200-400 А) и не предназначенных для отключения токов короткого замыкания.
[Цигельман И. Е. Электроснабжение гражданских зданий и коммунальных предприятий: Учеб. для электромеханич. спец. техникумов. - М.: Высш. шк. 1988.]
выключатель нагрузки
Выключатель, предназначенный для коммутации электрических цепей в нормальных условиях эксплуатации и в определенных условиях перегрузки, а также для пропускания в течение заданного интервала времени токов в условиях, отличных от нормальных.
Примечание. Выключатель нагрузки может быть способен включать токи короткого замыкания
[СТ СЭВ 1936-79]Выключатель нагрузки, по сути, представляет собой обычный разъединитель с простейшей дугогасительной камерой. Их начали применять около 60 лет тому назад в электроустановках 3, 6, 10 кВ в тех случаях, когда применение дорогих выключателей оказывается неэкономичным. В те времена этот коммутационный аппарат был выполнен в виде разъединителя и высоковольтного предохранителя, поскольку токи нагрузки в электроустановках 6 – 10 кВ были небольшими, по сравнению с современными нагрузками в электрическую сеть. В этом сочетании, разъединитель был предназначен для отключения и включения токов холостого хода, а также включения токов нагрузки, плавкому предохранителю отводилась роль защиты электроустановки от токов перегрузки и короткого замыкания.
По мере развития производства и соответственно энергетических нагрузок, токов холостого хода электроустановок стали применять так называемые разъединители мощности. Это устройство объединило в себе выключатель, имевший дугогасительную камеру небольшой мощности, и разъединитель. Такая конструкция использовалась только для коммутирования токов нагрузки и небольших токов перегрузки. Чтобы использовать разъединители мощности в цепях питания силовых трансформаторов и конденсаторных батарей, необходимо было устанавливать дополнительно высоковольтные плавкие предохранители, для осуществления защиты от токов короткого замыкания.
Позднее, усовершенствовав эту конструкцию, путем монтажа простейшего дугогасительного устройства на разъединитель, разработчики пришли к созданию нового коммутационного аппарата, получившего название выключателя нагрузки. Как оказалось, эти аппараты дешевле разъединителя мощности и способны отключать довольно большие емкостные токи, работающих на холостом ходу линий электропередачи даже очень высокого напряжения.
В данное время выключатель нагрузки успешно применяется во многих электроустановках, в том числе в качестве генераторных выключателей, в цепях конденсаторных батарей. Выключатель нагрузки нашел применение и за рубежом, при этом гашение дуги выполняется весьма разнообразными способами: коммутации в воздухе, в вакууме, в элегазе, в трансформаторном масле и т.п. Повысился интерес к ним и у российских и украинских производителей, потому как по прошествии 10-15 лет произошли преобразования в электрических сетях – выделение высокого и низкого напряжений, а выключатель нагрузки является наиболее выгодным вариантом в решении вопроса экономии и надежности питания потребителей.[ http://forca.ru/stati/podstancii/vyklyuchateli-nagruzki-na-napryazhenie-6-10-kv.html]
Выключатели нагрузки
ВНР-10/630 предназначены для работы в шкафах комплектных распределительных устройств (КРУ), камерах стационарных одностороннего обслуживания (КСО) и комплектных трансформаторных подстанциях (КТП) на класс напряжения до 10 кВ трехфазного переменного тока частоты 50 и 60 Гц для системы с заземленной и изолированной нейтралью.Устройство и принцип работы выключателя нагрузки ВНР-10/630
Выключатель нагрузки состоит из сварной рамы с валом, на которой установлены шесть опорных изоляторов. На трех изоляторах, расположенных в нижней части рамы, крепятся контактные ножи, а на остальных изоляторах, расположенных в верхней части рамы — главные и дугогасительные контакты.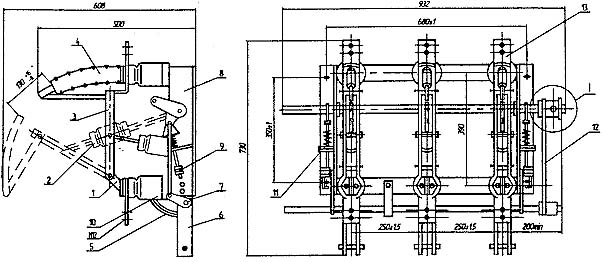
Передача движения от рычагов вала к контактным ножам осуществляется посредством изоляционных тяг.
На концах вала установлены по две отключающих пружины, позволяющих с определенной скоростью отключение выключателя после освобождения механизма свободного расцепления привода, а также два резиновых буфера для смягчения ударов при отключении.
Размыкание дугогасительных контактов происходит в дугогасительных камерах, выполненных из фенопласта и имеющих вкладыши из стеклонаполненного полиамита. Дугогасительным камерам и вкладышам придана дугообразная форма. Это дает возможность входить в них подвижным дугогасительным контактам.
При включении сначала замыкаются дугогасительные контакты, а затем ножи замыкают главные контакты, при отключении сначала размыкаются главные, а затем — дугогасительные контакты.
В отключенном положении подвижный дугогасительный контакт образует видимый воздушный промежуток с дугогасительной камерой, как в обычном разъединителе. При отключении между дугогасительными контактами образуется дуга. Под действием высокой температуры дуги стеклонаполненный полиамит выделяет большое количество газов, поток которых гасит дугу.[ http://www.avkenergo.ru/avkcatalog/vn/element6855.php]
Тематики
- высоковольтный аппарат, оборудование...
EN
Русско-английский словарь нормативно-технической терминологии > выключатель нагрузки
15 рабочее место
рабочее место
Элементарная единица структуры предприятия, где размещены исполнители работы, обслуживаемое технологическое оборудование, часть конвейера, на ограниченное время оснастка и предметы труда.
Примечание:
Определение рабочего места приведено применительно к машиностроительному производству. Определение рабочего места, применяемое в других отраслях народного хозяйства, установлено ГОСТ 19605
[ ГОСТ 14.004-83]
рабочее место
Зона, оснащенная необходимыми техническими средствами, в которой совершается трудовая деятельность исполнителя или группы исполнителей, совместно выполняющих одну работу или операцию
[ ГОСТ 19605-74]
рабочее место
Совокупность рабочего оборудования в рабочей области, окруженного рабочими условиями.
[ГОСТ Р ЕН 614-1-2003]
место рабочее
1. Определённый участок производственной площади, закреплённый за рабочим, служащим или бригадой, оборудованный соответственно характеру выполняемых работ
2. Расчётная единица для определения размеров торгового предприятия
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ОСНОВНЫХ ВОПРОСОВ ПЕРВИЧНОГО ИНСТРУКТАЖА НА РАБОЧЕМ МЕСТЕ
1. Общие сведения о технологическом процессе и оборудовании на данном рабочем месте, производственном участке, в цехе. Основные опасные и вредные производственные факторы, возникающие при данном технологическом процессе.
2. Безопасная организация и содержание рабочего места.
3. Опасные зоны машины, механизма, прибора. Средства безопасности оборудования (предохранительные, тормозные устройства и ограждения, системы блокировки и сигнализации, знаки безопасности). Требования по предупреждению электротравматизма.
4. Порядок подготовки к работе (проверка исправности оборудования, пусковых приборов, инструмента и приспособлений, блокировок, заземления и других средств защиты).
5. Безопасные приемы и методы работы; действия при возникновении опасной ситуации.
6. Средства индивидуальной защиты на данном рабочем месте и правила пользования ими.
7. Схема безопасного передвижения работающих на территории цеха, участка.
8. Внутрицеховые транспортные и грузоподъемные средства и механизмы. Требования безопасности при погрузочно-разгрузочных работах и транспортировке грузов.
9. Характерные причины аварий, взрывов, пожаров, случаев производственных травм.
10. Меры предупреждения аварий, взрывов, пожаров. Обязанность и действия при аварии, взрыве, пожаре. Способы применения имеющихся на участке средств пожаротушения, противоаварийной защиты и сигнализации, места их расположения.
[ ГОСТ 12.0.004-90]Тематики
- безопасность машин и труда в целом
- организация труда, производства
- технологическая подготовка производства
EN
DE
FR
3.18 рабочее место (workstation): Место оператора вблизи машины.
Примечание - В настоящем стандарте принимают, что рабочим местом является поверхность, охватывающая испытуемую машину на расстоянии 1 м от огибающего параллелепипеда.
Источник: ГОСТ 31336-2006: Шум машин. Технические методы измерения шума компрессоров и вакуумных насосов оригинал документа
3.1.3 рабочее место (work station): Место в непосредственной близости от машины, которое может быть занято оператором, или место, которое предназначено для выполнения производственного задания.
Источник: ГОСТ Р 52797.1-2007: Акустика. Рекомендуемые методы проектирования малошумных рабочих мест производственных помещений. Часть 1. Принципы защиты от шума оригинал документа
3.23 рабочее место (workplace): Установленное расположение элементов рабочей станции относительно оператора, предназначенное для выполнения производственного задания.
Источник: ГОСТ Р ИСО 9241-5-2009: Эргономические требования к проведению офисных работ с использованием видеодисплейных терминалов (VDT). Часть 5. Требования к расположению рабочей станции и осанке оператора оригинал документа
3.10 рабочее место (work station): Совокупность производственного оборудования и рабочего пространства для выполнения рабочим производственного задания.
[11064-2:2000]
Примечание - Возможна ситуация, когда несколько человек совместно используют одно рабочее место или когда несколько человек поочередно используют несколько рабочих мест в пределах заданного периода времени (по часам, дням, неделям).
Источник: ГОСТ Р 53454.1-2009: Эргономические процедуры оптимизации локальной мышечной нагрузки. Часть 1. Рекомендации по снижению нагрузки оригинал документа
3.1.5 рабочее место (workstation): Место в производственном помещении, где оператор выполняет работу.
Примечание 1 - Этот термин не распространяется на рабочую станцию, под которой понимают высокопроизводительный компьютер одного пользователя.
Примечание 2 - См. ИСО 11201:1995.
Источник: ГОСТ Р 53032-2008: Шум машин. Измерение шума оборудования для информационных технологий и телекоммуникаций оригинал документа
Русско-английский словарь нормативно-технической терминологии > рабочее место
16 рабочее место
рабочее место
Элементарная единица структуры предприятия, где размещены исполнители работы, обслуживаемое технологическое оборудование, часть конвейера, на ограниченное время оснастка и предметы труда.
Примечание:
Определение рабочего места приведено применительно к машиностроительному производству. Определение рабочего места, применяемое в других отраслях народного хозяйства, установлено ГОСТ 19605
[ ГОСТ 14.004-83]
рабочее место
Зона, оснащенная необходимыми техническими средствами, в которой совершается трудовая деятельность исполнителя или группы исполнителей, совместно выполняющих одну работу или операцию
[ ГОСТ 19605-74]
рабочее место
Совокупность рабочего оборудования в рабочей области, окруженного рабочими условиями.
[ГОСТ Р ЕН 614-1-2003]
место рабочее
1. Определённый участок производственной площади, закреплённый за рабочим, служащим или бригадой, оборудованный соответственно характеру выполняемых работ
2. Расчётная единица для определения размеров торгового предприятия
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ОСНОВНЫХ ВОПРОСОВ ПЕРВИЧНОГО ИНСТРУКТАЖА НА РАБОЧЕМ МЕСТЕ
1. Общие сведения о технологическом процессе и оборудовании на данном рабочем месте, производственном участке, в цехе. Основные опасные и вредные производственные факторы, возникающие при данном технологическом процессе.
2. Безопасная организация и содержание рабочего места.
3. Опасные зоны машины, механизма, прибора. Средства безопасности оборудования (предохранительные, тормозные устройства и ограждения, системы блокировки и сигнализации, знаки безопасности). Требования по предупреждению электротравматизма.
4. Порядок подготовки к работе (проверка исправности оборудования, пусковых приборов, инструмента и приспособлений, блокировок, заземления и других средств защиты).
5. Безопасные приемы и методы работы; действия при возникновении опасной ситуации.
6. Средства индивидуальной защиты на данном рабочем месте и правила пользования ими.
7. Схема безопасного передвижения работающих на территории цеха, участка.
8. Внутрицеховые транспортные и грузоподъемные средства и механизмы. Требования безопасности при погрузочно-разгрузочных работах и транспортировке грузов.
9. Характерные причины аварий, взрывов, пожаров, случаев производственных травм.
10. Меры предупреждения аварий, взрывов, пожаров. Обязанность и действия при аварии, взрыве, пожаре. Способы применения имеющихся на участке средств пожаротушения, противоаварийной защиты и сигнализации, места их расположения.
[ ГОСТ 12.0.004-90]Тематики
- безопасность машин и труда в целом
- организация труда, производства
- технологическая подготовка производства
EN
DE
FR
Русско-французский словарь нормативно-технической терминологии > рабочее место
17 неустойчивая работа
работа с перебоями — erratic operation; rough running
Авиация и космонавтика. Русско-английский словарь > неустойчивая работа
См. также в других словарях:
время — 3.3.4 время tE (time tE): время нагрева начальным пусковым переменным током IА обмотки ротора или статора от температуры, достигаемой в номинальном режиме работы, до допустимой температуры при максимальной температуре окружающей среды. Источник … Словарь-справочник терминов нормативно-технической документации
Время жизнеспособности — Время, в течение которого необходимо использовать двухкомпонентные краски после приготовления рабочего состава Примечания: 1. Под термином авария здесь и далее по тексту всегда понимается событие, связанное с радиационными последствиями. 2.… … Словарь-справочник терминов нормативно-технической документации
время срабатывания — 3.9 время срабатывания (response time): Интервал времени между отключением исполнительного устройства управления и окончанием выходного сигнала (см. также 9.8). Источник: оригинал документа 1.10. Время срабатывания Промежуток времени между… … Словарь-справочник терминов нормативно-технической документации
Проблемы работы — Проблемы работы. Саентология для рабочих будней Problems of Work. Scientology Applied to the Work a Day World … Википедия
Социология партийной работы — направление социологических исследований деятельности партийных организаций. Широкое развитие С. п. р. получила после Октябрьской революции. Основными проблемами исследований в этот период являлись: управление и партийное руководство в городе и… … Социологический справочник
Основные фонды — часть производственного капитала, которая натурально воплощена в средствах труда, обслуживает несколько циклов, до конца сохраняет свою натуральную форму; свою стоимость на продукцию переносит по частям в виде амортизации; восстанавливается за… … Краткий словарь основных лесоводственно-экономических терминов
Рынок труда — (Labor market) Рынок труда это сфера формирования спроса и предложения на рабочую силу Определение рынка труда, определение рабочей силы, структура рынка труда, субъекты рынка труда, конъюнктура рынка труда, сущность открытого и скрытого рынка… … Энциклопедия инвестора
Медицина — I Медицина Медицина система научных знаний и практической деятельности, целями которой являются укрепление и сохранение здоровья, продление жизни людей, предупреждение и лечение болезней человека. Для выполнения этих задач М. изучает строение и… … Медицинская энциклопедия
Устройство трактора — Трактор классического типа Основная статья: Трактор Трактор состоит из следующих механизмов и систем: Несущая система (Остов); Двигатель и его … Википедия
система — 4.48 система (system): Комбинация взаимодействующих элементов, организованных для достижения одной или нескольких поставленных целей. Примечание 1 Система может рассматриваться как продукт или предоставляемые им услуги. Примечание 2 На практике… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 50030.5.1-2005: Аппаратура распределения и управления низковольтная. Часть 5. Аппараты и коммутационные элементы цепей управления. Глава 1. Электромеханические аппараты для цепей управления — Терминология ГОСТ Р 50030.5.1 2005: Аппаратура распределения и управления низковольтная. Часть 5. Аппараты и коммутационные элементы цепей управления. Глава 1. Электромеханические аппараты для цепей управления оригинал документа: (обязательное)… … Словарь-справочник терминов нормативно-технической документации
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский
во время работы механизма
18+
© Академик, 2000-2024
- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.